自动驾驶功能测试主要分为四个部分,即环境感知测试、决策规划测试、控制执行测试和功能安全测试。
1. 环境感知测试:主要测试自动驾驶汽车对周围环境的感知能力,包括对道路、车辆、行人、交通信号灯等信息的识别和判断。测试方法包括传感器测试、场景模拟测试、实车测试等。
2. 决策规划测试:主要测试自动驾驶汽车的决策和规划能力,包括对行驶路径、交通流量的规划,以及在复杂路况下的决策反应能力。测试方法包括仿真测试、实车测试等。
3. 控制执行测试:主要测试自动驾驶汽车的控制执行能力,包括对车辆的加速、减速、转向、制动等操作的准确性。测试方法包括硬件在环测试、实车测试等。
4. 功能安全测试:主要测试自动驾驶汽车的功能安全性能,包括对潜在危险的预警和应对能力,以及紧急情况下的应急处理能力。测试方法包括故障注入测试、实车测试等。
自动驾驶功能测试方法有哪些?

随着科技的不断发展,自动驾驶汽车逐渐成为人们关注的焦点。自动驾驶汽车的普及将为我们的出行带来前所未有的便利和安全。在自动驾驶汽车的研发过程中,测试是非常重要的一环。本文将介绍自动驾驶功能测试的方法。
一、仿真测试

仿真测试是自动驾驶功能测试中常用的一种方法。通过仿真测试,可以在实际道路测试之前,对自动驾驶汽车的各项功能进行充分的测试和验证。在仿真测试中,通常会利用计算机模拟器来模拟道路场景,包括道路类型、交通流量、天气条件等等。通过模拟各种场景,可以测试自动驾驶汽车的应对能力和决策能力。
二、封闭场地测试
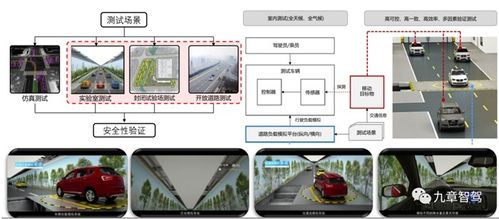
封闭场地测试是指在指定的封闭场地内进行自动驾驶汽车的测试。这种测试通常是在实际的道路测试之前进行的,以避免在公共道路上出现安全问题。在封闭场地测试中,通常会设置各种测试场景,例如障碍物避让、行人避让、交通拥堵等等。通过这些测试场景的测试,可以验证自动驾驶汽车的各项功能和性能。
三、实际道路测试

实际道路测试是自动驾驶功能测试中最为直接和有效的方法。通过在实际道路上进行测试,可以真实地检验自动驾驶汽车的各项功能和性能。在实际道路测试中,通常会选择各种道路类型和交通场景,例如城市道路、高速公路、乡村道路等等。通过这些测试,可以发现自动驾驶汽车在实际使用中存在的问题和不足,并进行改进和优化。
四、虚拟现实测试

虚拟现实测试是一种新型的自动驾驶功能测试方法。通过虚拟现实技术,可以模拟真实的道路场景和交通情况,对自动驾驶汽车的各项功能进行测试和验证。虚拟现实测试具有安全、便捷、可重复等优点,可以大大缩短测试周期和成本。
自动驾驶功能测试的方法有多种,包括仿真测试、封闭场地测试、实际道路测试和虚拟现实测试等。这些方法各有优缺点,应根据具体情况选择合适的测试方法。同时,在自动驾驶汽车的研发过程中,测试是非常重要的一环,必须严格把控测试的质量和安全性,以确保自动驾驶汽车的可靠性和安全性。