浅谈自动驾驶技术的现状及发展趋势
1. 引言
随着科技的快速发展,自动驾驶技术逐渐成为全球汽车产业关注的焦点。凭借其前瞻性、创新性和对未来交通方式的革命性影响,自动驾驶技术受到了广泛关注和深入研究。本文将详细探讨自动驾驶技术的现状,预测其发展趋势,并针对面临的挑战提出对策。
2. 自动驾驶技术现状
2.1 感知与感知融合技术
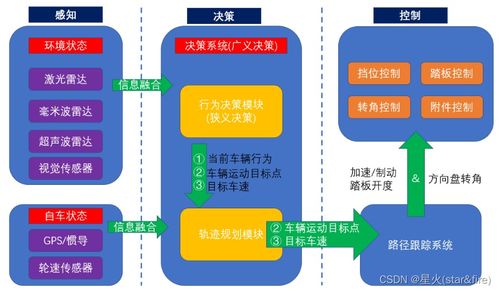
自动驾驶技术的核心之一是感知,即通过各种传感器(如雷达、激光雷达(LiDAR)、摄像头、超声波传感器等)收集车辆周围环境信息。这些传感器可以检测物体距离、方向、速度等,为车辆决策提供关键信息。目前,多传感器融合技术是解决感知问题的主要方法,通过不同传感器的优势互补,提高感知的准确性和稳定性。
2.2 路径规划与控制技术
路径规划和控制系统是自动驾驶技术的另一个核心组件。它负责根据车辆的当前位置和目标位置,规划出一条安全、高效的行驶路径。同时,控制系统会根据车辆状态和外部环境调整车辆速度、转向等,确保车辆按照预定路径行驶。目前,许多自动驾驶系统采用全局路径规划和局部控制相结合的方式,既能实现全局的最优路径规划,也能在局部实现快速响应和精确控制。
2.3 5G和C-V2X通信技术
5G和C-V2X(Cellular Vehicle-o-Everyhig)通信技术为自动驾驶提供了更高效、更稳定的通信方式。通过5G网络,车辆可以与云端进行高速、低延迟的数据交换,从而实现实时的地图更新、交通信息共享等功能。同时,C-V2X通信技术使得车辆能够与其他车辆(V2V)、基础设施(V2I)以及行人(V2P)进行实时通信,实现更高效的信息共享和协同驾驶。
2.4 人工智能与机器学习技术
人工智能(AI)和机器学习(ML)技术的发展为自动驾驶提供了强大的“大脑”。AI算法可以对感知数据进行深度处理,识别行人、车辆、道路标记等关键信息,并根据这些信息做出决策。同时,机器学习技术可以通过对大量数据进行训练和学习,不断提高自动驾驶系统的性能和准确性。
3. 自动驾驶技术发展趋势
3.1 多传感器融合与冗余设计
未来自动驾驶技术将更加注重多传感器融合和冗余设计。通过集成更多种类的传感器(如红外传感器、毫米波雷达等),实现更全面的环境感知。同时,为关键传感器设置冗余备份,当主传感器出现故障时,可以无缝切换到备份传感器,确保驾驶的安全性和稳定性。
3.2 边缘计算与云计算的结合
随着车辆计算能力的提升,边缘计算逐渐在自动驾驶领域得到应用。在边缘计算框架下,一部分数据处理和计算任务将在车辆本地进行,从而降低数据传输延迟和云端计算压力。同时,通过与云端的高效交互,可以实现更丰富的功能和更精确的决策。
3.3 V2X通信技术的普及和应用
随着5G和C-V2X技术的发展,未来自动驾驶将更加依赖于V2X通信技术。通过实现车与车、车与基础设施以及车与云端的实时通信,V2X将大幅提升道路安全性和交通效率。例如,通过V2V通信技术实现车辆之间的实时协作驾驶,通过V2I通信技术获取实时交通信息和道路状况等。